This was a joint program between the USA and Sweden.[^1] It would continuously predict the aircraft flightpath 10-15 seconds into the future.[^1] This required a high-fidelity model for aircraft response.[^1] The terrain database is scanned around the aircraft location for hazardous features.[^1] The scanned terrain points are collapsed into a recovery profile and then sorted into range bins.[^1] 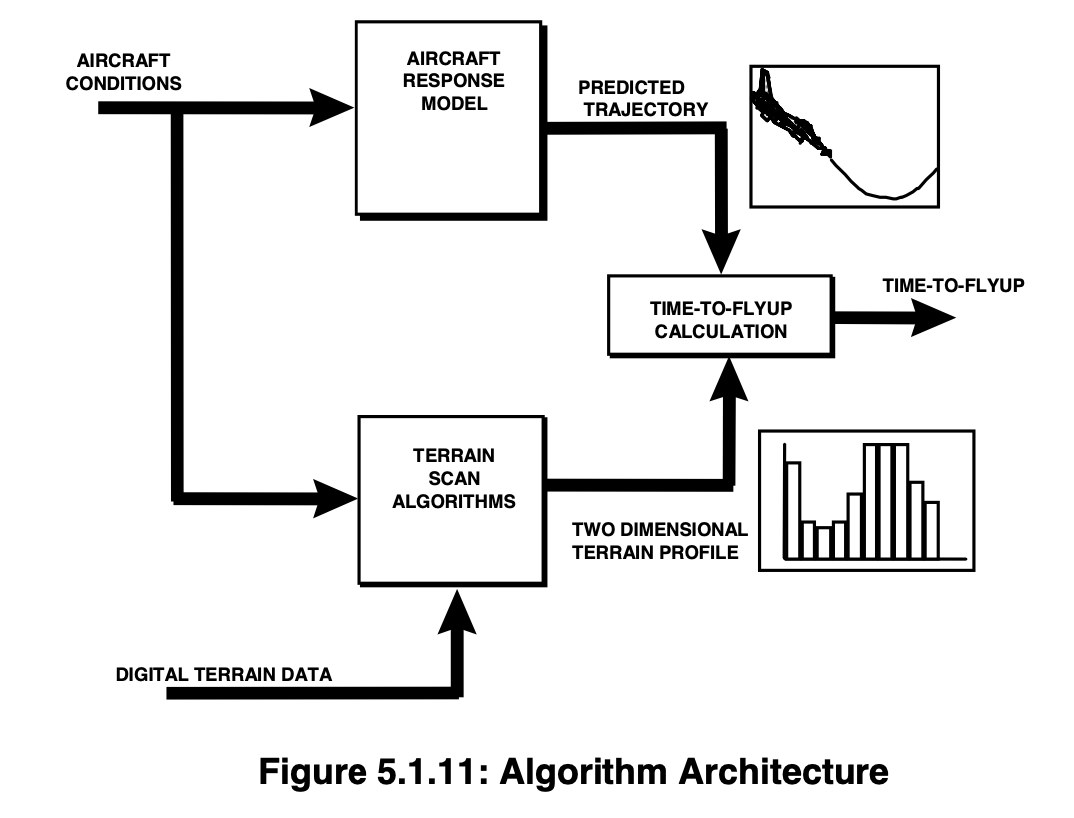 [^1]
[^1]
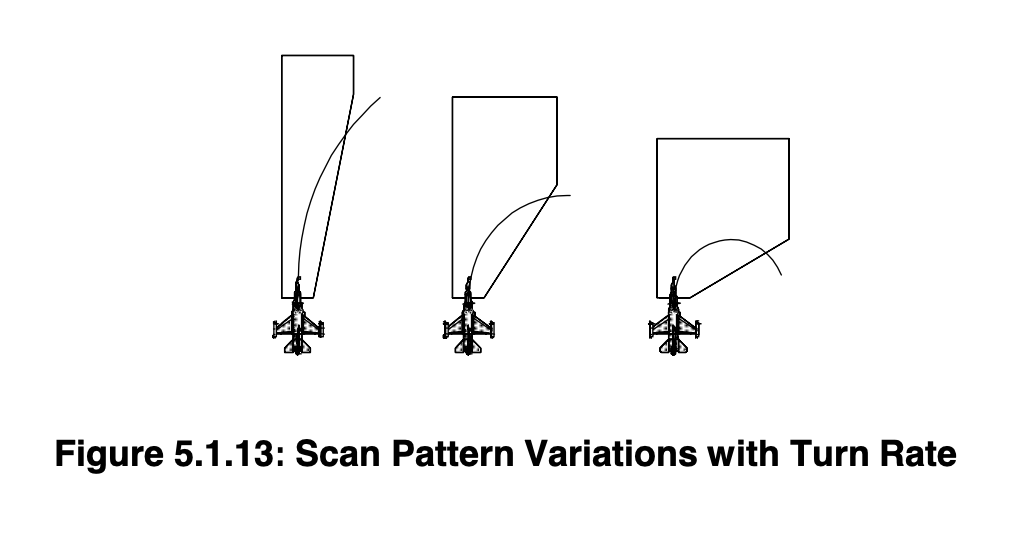
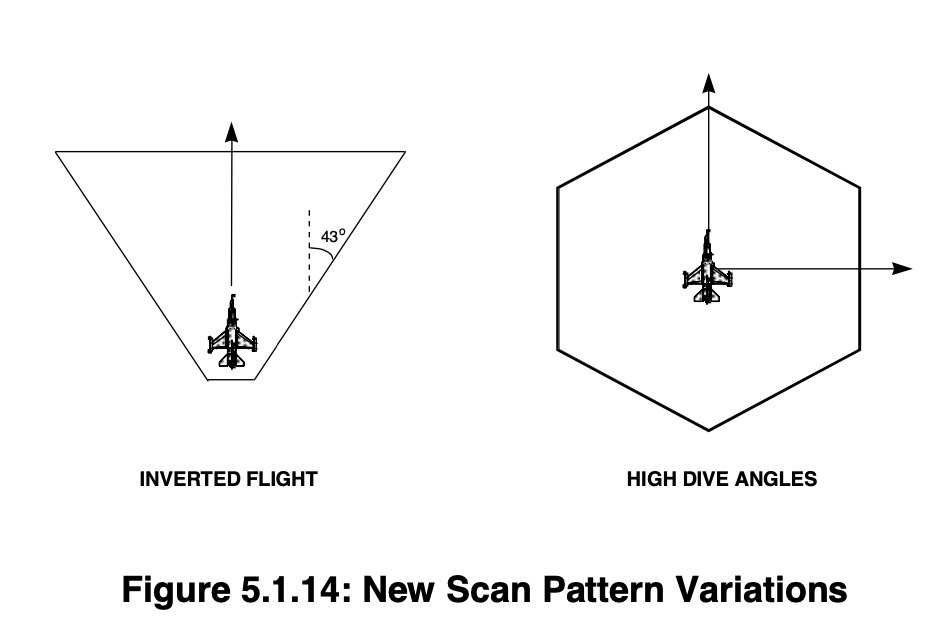
The width of the range bins is based on navigation uncertainty.[^1] At 5 seconds for the fly-up-time, chevrons appear on the HUD.[^1] At 0 seconds the auto-recovery is initiated.[^1] The recovery is a roll to wings-level and a 5g pull up.[^1] If the aircraft is inverted, the pull is started once the wings are less than 90 degrees level.[^1] It used different scan patterns.[^2]
 [^2]
[^2]
 [^2]
[^2]
RTO-TR-029[^1]